Control Barrier Function Meets Interval Analysis: Safety-Critical Control with Measurement and Actuation Uncertainties
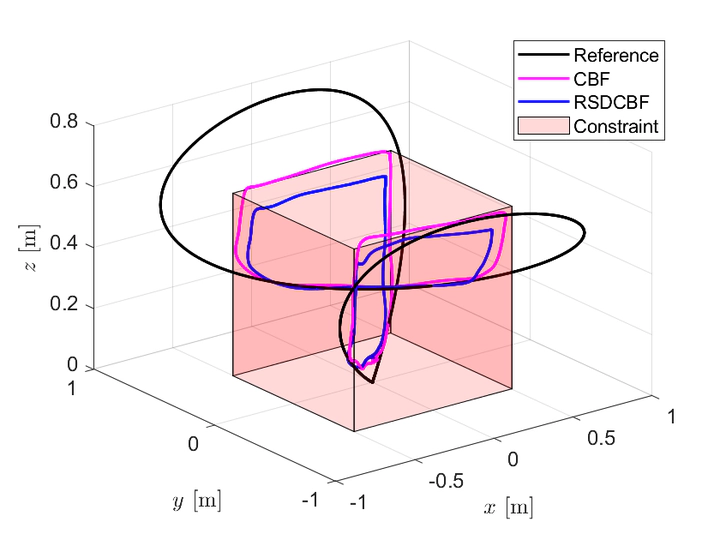 Experiment result of proposed safe controller (RSDCBF)
Experiment result of proposed safe controller (RSDCBF)Abstract
This paper presents a framework for designing provably safe feedback controllers for sampled-data control affine systems with measurement and actuation uncertainties. Based on the interval Taylor model of nonlinear functions, a sampled-data control barrier function (CBF) condition is proposed which ensures the forward invariance of a safe set for sampled-data systems. ℝeachable set overapproximation and Lasserre’s hierarchy of polynomial optimization are used for finding a margin term in the sampled-data CBF condition. Sufficient conditions for a safe controller in the presence of measurement and actuation uncertainties are proposed. The effectiveness of the proposed method is illustrated by a numerical example and an experimental example that implements the proposed controller on the Crazyflie quadcopter in real-time.
Type
Publication
American Control Conference (ACC)