Safety Verification of Neural Feedback Systems Based on Constrained Zonotopes
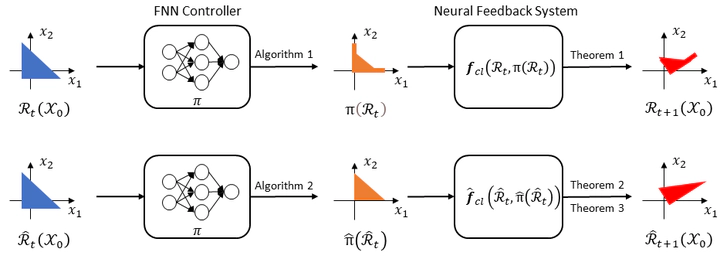 Overview of proposed approach
Overview of proposed approachAbstract
Artificial neural networks have recently been utilized in many feedback control systems and introduced new challenges regarding the safety of such systems. This paper considers the safe verification problem for a dynamical system with a given feedforward neural network as the feedback controller by using a constrained zonotope-based approach. A novel set-based method is proposed to compute both exact and over-approximated reachable sets for neural feedback systems with linear models, and linear program-based sufficient conditions are presented to verify whether the trajectories of such a system can avoid unsafe regions represented as constrained zonotopes. The results are also extended to neural feedback systems with nonlinear models. The computational efficiency and accuracy of the proposed method are demonstrated by two numerical examples where a comparison with state-of-the-art methods is also provided.
Type
Publication
IEEE 61st Conference on Decision and Control (CDC)