Hybrid Zonotope-Based Backward Reachability Analysis for Neural Feedback Systems With Nonlinear Plant Models
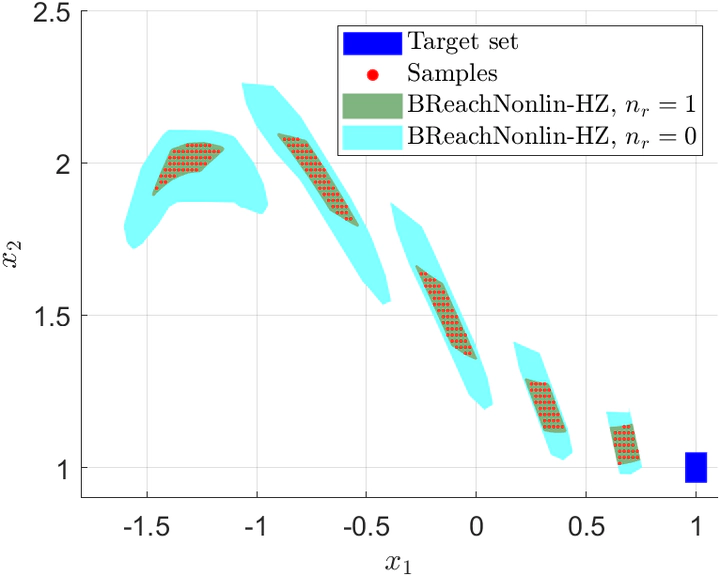 Over-approximated backward reachable sets
Over-approximated backward reachable setsAbstract
The increasing prevalence of neural networks in safety-critical control systems underscores the imperative need for rigorous methods to ensure the reliability and safety of these systems. This work introduces a novel approach employing hybrid zonotopes to compute the over-approximation of backward reachable sets for neural feedback systems with non-linear plant models and general activation functions. Closed-form expressions as hybrid zonotopes are provided for the over-approximated backward reachable sets, and a refinement procedure is proposed to alleviate the potential conservatism of the approximation. Two numerical examples are provided to illustrate the effectiveness of the proposed approach.
Type
Publication
American Control Conference (ACC)