Goal-Reaching Control Synthesis for Neural Network Control Systems via Backward Reachability
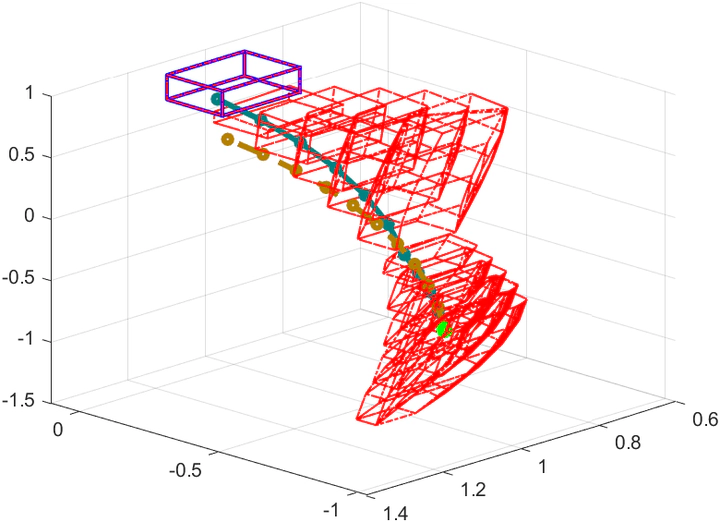 Under-approximated BRSs and state trajectories
Under-approximated BRSs and state trajectoriesAbstract
This letter investigates goal-reaching control synthesis for neural network control systems. A backward reachability framework is developed based on constrained zonotopes, in which the graph set of a ReLU-activated feedforward neural network is encoded as a finite union of constrained zonotopes. Using this representation, under-approximations of backward reachable sets are computed for systems with nonlinear plant models, ensuring the feasibility of the goal-reaching task. Control sequences are then synthesized through an optimization procedure that exploits the under-approximated set. A numerical example demonstrates the effectiveness of the proposed approach.
Type
Publication
IEEE Control Systems Letters